- تماس با ما
- ۰۲۱-۸۲۸۰۵۹۱۱
- ۰۲۱-۹۱۳۰۰۴۷۶
- info@arka.ir
ربات ضد لغزش در زمان واقعی با زمین های چالش برانگیز سازگار می شود

دستیار صوتی گوگل صدای کاربران را مخفیانه ضبط میکند
11/07/2021نحوه تمدید لایسنس فایروال سوفوس
11/07/2021
ربات ها مواجهه با یک سطح یا مانع غیرمعمول را معمولاً به معنای توقف ناگهانی یا سقوط سخت می دانند. اما محققان مدل جدیدی برای حرکت رباتیک ایجاد کرده اند که بلادرنگ با هر زمینی که روبرو شود سازگار می شود و راه رفتن خود را هنگام پرواز تغییر می دهد تا در هنگام برخورد با شن و ماسه ، سنگها ، پله ها و دیگر تغییرات ناگهانی ، مشکلی بوجود نیاید.
اگرچه حرکت رباتیک می تواند متنوع و دقیق باشد ، و روبات ها می توانند بالا رفتن از پله ها ، عبور از زمین های شکسته و غیره را یاد بگیرند. رباتهایی مانند Spot معروف به عقب نشینی از فشار و لگد هستند ، اما این سیستم در حال کار برای اصلاح ناهنجاری جسمی در حالی که سیاست تغییرناپذیری راه رفتن را دنبال می کند ، است. برخی از مدل های حرکت انطباقی وجود دارد ، اما برخی از آنها بسیار خاص هستند (به عنوان مثال این مدل بر اساس حرکات واقعی حشرات است) و برخی دیگر به اندازه کافی طول می کشد تا کار کند تا اینکه ربات مطمئناً سقوط می کند.
این تیم ، از Facebook AI ، UC Berkeley و University Carnegie Mellon ، آن را سازگاری سریع موتور می نامند. این امر از این واقعیت ناشی می شود که انسان و سایر حیوانات قادرند به سرعت ، به طور موثر و ناخودآگاه راه رفتن خود را متناسب با شرایط مختلف تغییر دهند.
“فرض کنید شما پیاده روی یاد گرفته اید و برای اولین بار به ساحل می روید. پای شما غرق می شود و برای بیرون آوردن آن باید نیروی بیشتری وارد کنید. این احساس عجیب و غریب است ، اما در چند مرحله شما به طور طبیعی راه می روید دقیقاً مانند زمین سخت. راز آنجا چیست؟ ” از محقق ارشد Malik ، که وابسته به هوش مصنوعی فیس بوک و دانشگاه برکلی است ، پرسیده شد:
مطمئناً اگر قبلاً هرگز به ساحل نرفته اید ، اما حتی بعداً ، این حالت “شن و ماسه” خاصی را تجربه کرده اید که به شما امکان می دهد روی سطوح نرم راه بروید. نحوه تغییر حرکت شما به صورت خودکار و بدون درک واقعی از محیط خارجی اتفاق می افتد.
مالک توضیح داد: “آنچه اتفاق می افتد این است که بدن شما با احساس عواقب مختلف آن شرایط بر روی بدن ، به شرایط مختلف جسمی پاسخ می دهد – و سیستم RMA نیز به روشی مشابه کار می کند. “هنگامی که در شرایط جدید راه می رویم ، در مدت زمان بسیار کوتاه ، نیم ثانیه یا کمتر ، اندازه گیری های کافی را انجام داده ایم که در حال ارزیابی این شرایط هستیم و سیاست راه رفتن را اصلاح می کنیم.”
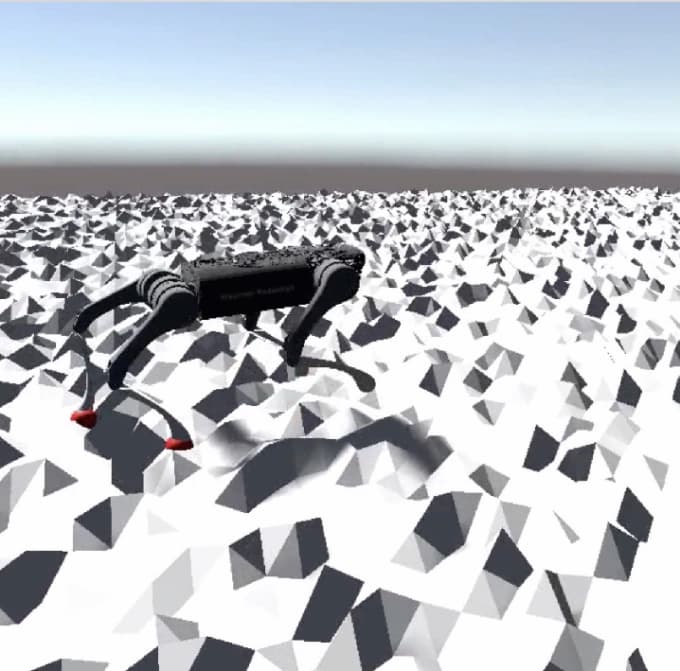
تجسم محیط شبیه سازی. مطمئناً این ربات از نظر بصری هیچ یک از اینها را درک نخواهد کرد. اعتبار تصویر: تحقیقات هوش مصنوعی برکلی ، تحقیقات AI فیس بوک و CMU
این سیستم به طور کامل در شبیه سازی ، در یک نسخه مجازی از دنیای واقعی آموزش دیده است که در آن مغز کوچک ربات یاد گرفت که با حداقل انرژی حرکت به جلو را به حداکثر برساند و با مشاهده سریع و پاسخ دادن ، از سقوط جلوگیری کند.
برای علامت گذاری رویه کلی RMA ، Malik خاطر نشان کرد که این ربات از هیچ ورودی بصری استفاده نمی کند. اما افراد و حیوانات بدون دید می توانند بسیار خوب راه بروند ، پس چرا یک ربات نباید این کار را انجام دهد؟ اما از آنجا که تخمین “عوامل خارجی” مانند ضریب اصطکاک دقیق شن و ماسه یا سنگهایی که روی آنها می رود غیرممکن است ، به راحتی مراقب خودش است.
Ashish Kumar ، نویسنده ، از برکلی ، گفت: “ما در مورد شن و ماسه یاد نمی گیریم ، اما در مورد غرق شدن پا یاد می گیریم.”
در نهایت این سیستم دارای دو قسمت است: یک الگوریتم اصلی که همیشه در حال اجرا است و در واقع راه رفتن ربات را کنترل می کند و یک الگوریتم تطبیقی که به طور موازی در حال اجرا است و تغییرات خوانش های داخلی ربات را کنترل می کند. وقتی تغییرات قابل توجهی شناسایی شد ، آنها را تجزیه و تحلیل می کند – پاها باید این کار را انجام دهند ، اما آنها این کار را می کنند ، به این معنی که وضعیت به این شکل است – و به مدل اصلی می گوید که چگونه خود را تنظیم کند. از آن به بعد ، ربات فقط در مورد چگونگی حرکت به جلو در این شرایط جدید فکر می کند ، و به طور موثر یک راه رفتن تخصصی را انجام میدهد.
پس از آموزش شبیه سازی ، همانطور که در خبر منتشر شده است ، در دنیای واقعی بسیار موفق شد:
این ربات قادر بود بر روی شن و ماسه ، گل و لای ، مسیرهای پیاده روی ، چمن های بلند و یک انبوه خاکی راه برود ، بدون اینکه در همه آزمایشات ما یک شکست داشته باشد. این ربات در 70٪ از آزمایشات با موفقیت از پله ها در امتداد یک مسیر پیاده روی پایین رفت. در 80٪ آزمایشات با یک توده سیمان و یک توده سنگریزه حرکت کرد. همچنین هنگام حرکت با محموله 12 کیلویی که 100٪ از وزن بدن آن است ، قامت خود را با موفقیت بالایی حفظ کرد.
غریزه تیم این بود که اگر شما رباتی می خواهید که از پس هر موقعیتی برآید ، باید سازگاری را از ابتدا یاد بگیرد ، نه اینکه حالت های مختلفی برای انتخاب داشته باشد.
همانطور که نمی توانید با برچسب زدن کامل و مستند سازی بر روی هر شی و تعامل ، یک سیستم هوشمند بینایی کامپیوتر ایجاد کنید (همیشه موارد بیشتری وجود خواهد داشت) ، شما نمی توانید یک ربات را برای یک دنیای فیزیکی متنوع و پیچیده با 10 ، 100 و یا هزاران پارامتر ویژه که برای راه رفتن بر روی شن ، گل ، آوار ، چوب مرطوب و غیره وجود دارد آماده کنید. برای این موضوع حتی ممکن است اصلاً نخواهید چیزی فراتر از ایده کلی حرکت رو به جلو تعیین کنید.
Kumar گفت: “ما ایده ای را که برای پاها یا هر چیز در مورد مورفولوژی ربات دارد ، از قبل برنامه ریزی نمی کنیم.”
این بدان معنی است که اساس سیستم در نهایت خود را به چهار راهه تبدیل کرده است – می تواند نه تنها در مورد سایر ربات های پا ، بلکه حوزه های کاملاً متفاوت AI و رباتیک نیز اعمال شود.
پاهای یک ربات شبیه انگشتان دست است. نحوه تعامل پاها با محیط ، انگشتان با اشیا ارتباط برقرار می کنند. ” “ایده اصلی را می توان برای هر روباتی استفاده کرد.”
Malik پیشنهاد داد ، جفت شدن الگوریتم های اساسی و انطباقی می تواند برای سایر سیستم های هوشمند کارساز باشد. خانه های هوشمند و سیستم های شهری متکی به سیاست های قبلی هستند ، اما اگر در عوض خود را با پرواز سازگار کنند ، چه می کنید؟
در حال حاضر این تیم به سادگی یافته های اولیه خود را در مقاله ای در همایش Robotics: Science and Systems ارائه می دهد و اذعان می کند که تحقیقات زیادی برای پیگیری وجود دارد. به عنوان مثال ساخت یک کتابخانه داخلی از ایستاده های بداهه به عنوان نوعی حافظه “میان مدت” یا استفاده از بینایی برای پیش بینی ضرورت آغاز سبک جدیدی از حرکت. اما به نظر می رسد رویکرد RMA یک رویکرد جدید امیدوار کننده برای یک چالش پایدار در رباتیک است.



{kind=link}
{kind=link}
{kind=link}